
Newsportal - Ruhr-Universität Bochum
ROBOT150 Endstation
ROBOTER
Um Wafer bis zu 150 mm Durchmesser bearbeiten zu können, ist eine Endstation mit Robotern für das Handling unter Vakuumbedingungen im Einsatz. Der gesamte Implantationszyklus wird computergestützt, vollautomatisch nach einem kundenorientierten Rezept durchgeführt.
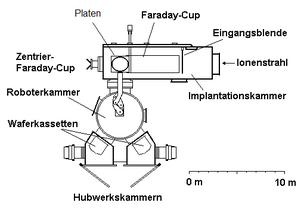
Die Roboterkammer befindet sich zwischen der Implantationskammer und den beiden Hubwerkskammern. In den Hubwerkskammern befindet sich jeweils ein Carrier mit bis zu 25 Wafern.
Der Roboterarm dreht sich zu einer angewählten Hubwerkskammer und holt einen Wafer A aus dem Carrier. Der Roboterarm dreht sich mit dem Wafer A in der Roboterkammer und bringt den Wafer A in die Implantationskammer. Dort wird der Wafer A von der Station Ablage übernommen. Der Roboterarm zieht sich aus der Implantationskammer zurück. Der Wafer A wird nun von der Station Platen übernommen und in die Implantationsposition gestellt. Die Implantation wird gestartet. Während der Implantation des Wafers A dreht sich der Roboterarm zu der angewählten Hubwerkskammer und holt einen weiteren Wafer B aus dem Carrier. Der Roboterarm dreht sich mit dem Wafer B in der Roboterkammer und wartet auf den Schritt Übergabe.
Nach der Implantation wird der Wafer A von der Station Platen wieder an die Station Ablage übergeben.
Der Parkarm übernimmt den Wafer A von der Station Ablage und zieht sich mit dem fertig implantierten Wafer A in die Warteposition zurück. Der Roboterarm bringt den Wafer B in die Implantationskammer. Dort wird der Wafer B von der Station Ablage übernommen. Der Roboterarm zieht sich aus der Implantationskammer zurück. Der Wafer B wird nun von der Station Platen übernommen und in die Implantationsposition gestellt. Die Implantation wird gestartet. Der Parkarm bringt den Wafer A aus der Warteposition in die Implantationskammer. Dort wird der Wafer A von der Station Ablage übernommen. Der Parkarm zieht sich wieder zurück in die Warteposition. Der Roboterarm übernimmt den Wafer A von der Station Ablage, zieht sich aus der Implantationskammer zurück, dreht sich in der Roboterkammer und bringt den Wafer A zurück in den Carrier aus dem dieser entnommen wurde.
Mit den weiteren Wafern wird fortlaufend ebenso verfahren, so dass die weiteren Wafer kontinuierlich implantiert werden. Während die Wafer des einen Carrier implantiert werden, kann der andere Carrier ausgetauscht und das Vakuum wieder hergestellt werden.

Während der Implantation ist der Wafer am Ende eines tiefen Faraday-Cups wodurch die Messung der Ionendosis direkt am Wafer erfolgen kann. Faraday-Cup, Platen und Eingangsblende sind auf einer Seitentür der Kammer montiert. Die Eingangsblende kann an die Größe des Wafer angepasst werden.
Ein CTNR-Faraday-Cup am Ende der Implantationskammer dient zur Einstellung (Fokussierung und Zentrierung) des nichtabgelenkten Strahls. Nach dieser Fokussierung und Zentrierung wird die Ablenkspannung angelegt und der Nullstrom am Wafer, als Ablenkspannungsumkehrpunkt, nachgewiesen und mit einem Dosecontroller dc 101 der Firma tribotec-electronic GmbH eingestellt.
